Contents
3. Computational models
When studying a social phenomenon such as language, there are certain “predictable” patterns in human behavior that we can try to model with statistical physics or mathematics to represent large-scale population behavior (Loreto & Steels, 2007). As mentioned in Chapter 4, agent-based modelling is a new analytical method for social sciences. It enables one to build models where individual entities and their interactions are directly represented. The collective result (“macro” phenomena) of interactions of interactions among individual agents (“micro” dynamics) can be observed, or inferred from these modeling efforts (Castellano, Fortunato, & Loreto, 2009). Basically, it allows one to represent multiple scales of analysis in a natural and efficient way. In linguistics, we can use agent-based modelling to study the emergence and evolution of language (Sierra-Santibánez, 2015).
3.1 Literature on agent-based modeling
The origins of agent-based modeling started in the 1940s when Von Neumann and Ulam created the concept of cellular automata (Neumann, 1966; Ulam, 1960). In linguistics, earlier work in this area sought to explain the role of interaction and negotiation, or biases of learners in shaping communication systems, focusing mainly on the conditions under which communicatively optimal, socially learnt communication systems would emerge (Kirby, Griffiths, & Smith, 2014). Thereafter, researchers tried to find out how linguistic structure can arise from iterated learning (Kirby, 2001). Emphasis was given on the role of bottleneck learning, which was thought to be the driving force behind the evolution of structure, since language learners must try to learn an infinitely expressive linguistic system on the basis of a small set of linguistic data (Kirby, 2001). A major finding is that compositional languages emerge from unstructured languages due to repeated transmission through the learning bottleneck – language structure appears as an adaptive response by language per se to the problem of being transmitted through a narrow bottleneck, since the presence of compositional rules enables a learner to infer from a small sample rules underpinning the whole language (Kirby, 2001).
There is another model that represents the emergence of systematicity in phonological systems through communicative interaction and iterated learning. One example would be De Boer who looked at the cultural evolution of vowel systems, showing that the universal features of the organisation of all the vowels in the world can arise through repeated interaction between simulated agents under certain reasonable articulatory and perceptual constraints.
Besides the findings on compositionality and vowel systems, there are other areas of communication and language that we can look at using computational models. In the sections below, we present how computational models (in the form of autonomous computer programs in physical robot bodies called “embodied agents”) demonstrate the emergence of certain behaviors that underscore communication (also see: Chapter 4). Computational models can help us understand how a basic level of cooperation can be achieved (via acoustic signalling) among embodied agents with a case study (Ampatzis, Tuci, Trianni, & Dorigo, 2010). This occurs prior to the emergence of language. Additionally, we present an experiment by Luc Steels (2010) to show how embodied agents can form an inventory of spatial categories to communicate by switching perspectives between itself and corresponding agents.
3.2 Embodied agents in communication studies
Embodied agents come in two forms – physical and virtual. A physical embodied agent possesses a physical body, unlike that of a virtual agent. Some of these physical agents are built with human-like or animal-like features which provide them with the physical capabilities to perform certain tasks or actions (Sukthankar, 2008). A humanoid robot such as the iCub robot (Parmiggiani et al., 2015) is an example of a physical embodied agent that resembles a 3-year-old child.
On the other hand, the virtual embodied agent, also known as the interface agent, is represented by a simulated avatar that one sees on a computer screen (Serenko, Bontis, & Detlor, 2007). The computer simulation is achieved with the use of relevant software and artificial intelligence (Serenko, Bontis, & Detlor, 2007). For example, one is able to interact with a conversational agent that provides students who attend online lessons with tutoring services.
These embodied agents form a communication system that resembles human language (Parisi, 2010). In constructing these artificial organisms that behave like real-life organisms, we can further improve our understanding on the behaviours of the latter that aid in linguistic and other scientific research (Parisi, 2010). Before researchers can further progress into the aspects of grammar and lexicon in language evolution using embodied agents, it is important to maximise the potential of these agents’ communication capabilities. Hence, the emergence of communication in embodied agents is a crucial phase in the evolution of language itself. Further, devices or other technological equipment can be created or improved on to assist humans in their daily activities (Parisi, 2010).
3.2.1 General framework of embodied cognition
To enable embodied agents to communicate, Mirolli and Nolfi (2010) emphasise on the importance of the general framework of embodied cognition. The theory is primarily a collection of different ideas in understanding behaviour but are related in challenging the classical cognitive science paradigm where the physicality of these agents and their environments are not taken into consideration (Mirolli & Nolfi, 2010). Hence, they discuss three important aspects with relevance to the physicality of these agents and their environments.
Firstly, the aspect of “situatedness” refers to the environment in which the agent is located in (Mirolli & Nolfi, 2010). Parameters must be clearly defined to regulate the interaction between the agents and their external environment and for some cases, the interaction with other agents in the same environment (Mirolli & Nolfi, 2010). In short, “situatedness” provides the agent with the details of the activity and environment (Mirolli & Nolfi, 2010).
Secondly, the aspect of “embodiment” refers to physical properties or characteristics of the body of an agent (Mirolli & Nolfi, 2010). The important characteristics include the agent’s weight, height, shape and size and the type, position, and number of its actuators and sensors (Mirolli & Nolfi, 2010). These properties will affect how the agent behave and solve problems (Mirolli & Nolfi, 2010). In addition, the control system, or its “brain” fundamentally influences the agent’s behaviour. When the agent is required to possess similar characteristics as natural organisms, control systems such as the artificial neural networks are preferred and for agents which are simpler and less bio-mimetic, look-up tables or production rules can be used instead (Mirolli & Nolfi, 2010).
Lastly, the aspect of “adaptivity” refers to the understanding that communication is not the sole action performed by the agents (Mirolli & Nolfi, 2010). The agent’s adaptive value needs to be taken into consideration where communication is investigated as a way of sub-serving other non-communicative behaviours (Mirolli & Nolfi, 2010). It aids in studying the merging development and adaptation between communicative and non-communicative behaviours (Mirolli & Nolfi, 2010).
While these three aspects are crucial in understanding how agents should behave and communicate, it is pivotal to note that they do not more form a clear-cut dichotomy and in setting-up experiments with embodied agents, a continuum exists where all three aspects are either fully present or not present at all (Mirolli & Nolfi, 2010).
3.2.2 Evaluation criteria in the assessment of communication
Based on these agents’ sensory-motor experiences, researchers are able to further study how signals and meanings originate (Mirolli & Nolfi, 2010). These signals play a role in monitoring the progress of communication in embodied agents such as their expressive power and organizational complexity. The number of signals produced will allow us to understand the adaptiveness of the agents. Further, the type of signals emitted provides information on the meaning of the message. For instance, the comparison between deictic and displaced signals presents referential information on the current context experienced by the issuer and the recipient. A set of rules is also necessary in regulating how signals are exchanged among agents whereby the agents are able to function ideally according to the circumstance or environment. While the structure of signals is an important dimension in the evaluation, the development of structured forms of communication yet to be initiated by embodied agents themselves and will represent as an achievement in this field of the research.
Other criteria in monitoring the agents’ communicative performance include understanding the adaptive role of the agents, recording the level of robustness or stability of the communication system, and modelling original or new theories (Mirolli & Nolfi, 2010).
3.2.3 Case study of the evolution of signalling in a multi-robot system
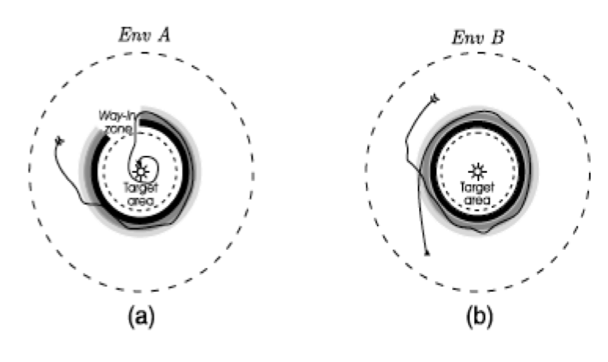
Fig. 1. The set-up of the experiment (a) Environment A and (b) Environment B (Ampatzis, Tuci, Trianni, & Dorigo, 2010, p. 163).
In this experiment (Ampatzis, Tuci, Trianni, & Dorigo, 2010), there are two circular zones created with a diameter of 120 cm – namely environment A and environment B. In each environment, there is a presence of a light source and two s-robots are placed randomly at 75 and 95 cm away from the light source. The light sources in both environments are surrounded by a coloured band each and these colours represent the “danger” zone. However, in environment A, a section of the band is removed to create a “way in” zone which is a path designated for the robots to travel on to reach the light source whereas in environment B, there is an absence of the “way in” zone. The ultimate goal of the experiment is for both robots to discriminate between two different environments where they are able to move towards the light source safely in environment A and away from the danger zone in environment B.
Equipped with light sensors, floor sensors and a sound signalling system, the s-robots will first navigate around the environment with their wheels. When they are faced with “danger”, they will emit a sound to indicate that they are aware of the “danger” and begin to move away accordingly. It was found that these robots did not only communicate with the experimenter via their sound signals but the other robot in the same zone also responded to the sound signal and moved away from the coloured band. The s-robots were not just communicating via sound signalling but were behaving socially. Furthermore, the sound signal shows that it is an encoding sensory information that is integrated over time and contributes to the increase in the reliability of the categorisation process.
3.3 Embodied agents in language studies
Besides communication studies, certain aspects of language such as name formation, spatial inventories, and grammatical case can also be investigated using embodied agents. Due to the constraints in this wiki chapter, only the spatial language and perspective reversal game (Steels, 2010) will be briefly introduced.
Consider this example: When two people are standing opposite each other, they see the world differently because of the different vantage points that each person is adopting. However, the body of the self remains a constant landmark that can be used as a reference point. Thus, one could use various spatial terms such as left, right, up, and down (with respect to her own body) to communicate with the other about directions. How can embodied agents with no predefined inventory of spatial terms convey meaningful utterances to another?
3.3.1 Methodology
In this experiment, the researchers test the assumption of egocentric perspective transformation (EPT) (Steels, 2010). EPT is the agent’s ability to transform certain features of an object with respect to the position of another object. Over the course of approximately 5000 games, the experiments revealed that the agents are able to self-organize a communication system that includes the formation of an inventory of spatial categories (Steels, 2010). The embodied agents used in the study were five AIBO robot dogs that could move freely within an indoor laboratory.
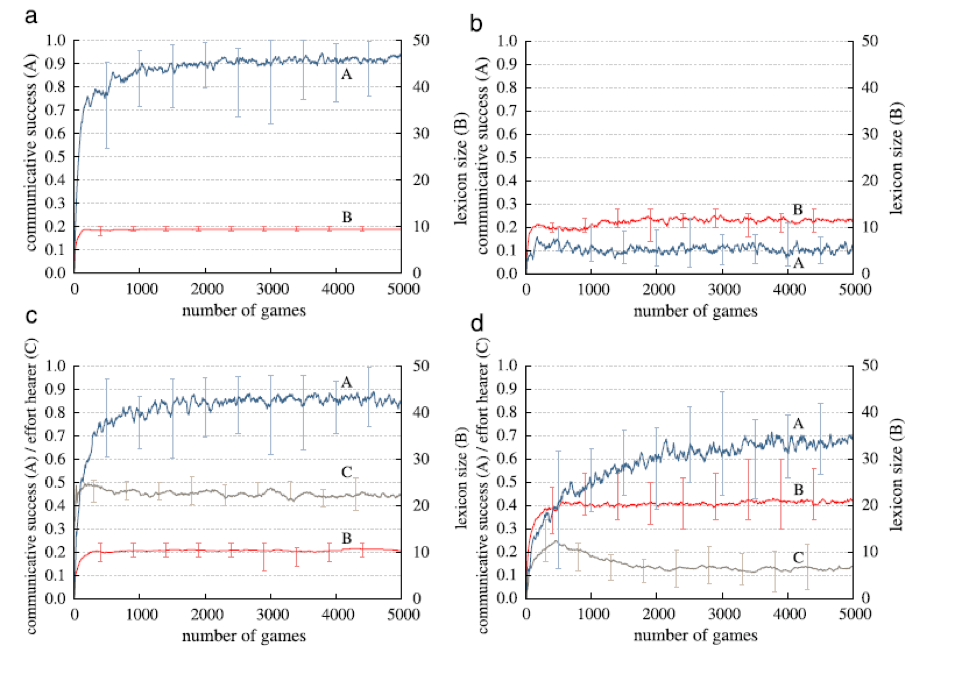
Fig. 2. Graph of experimental results comparing the communicative successes of the AIBO robots (a) without any need for EPT, (b) required EPT, but could not perform it (c) could perform EPT but did not have spatial language lexicon and (d) could perform EPT and had spatial categories marked in language (Steels, 2010, p. 251).
3.3.2 Results
It was found that EPT in these robots were highly required for communicative success because EPT reduced the amount of cognitive effort needed for language users (Steels, 2010). A seen in the graph above, robots without EPT (graph b) only achieved 15% communicative success. In graph c, we see that robots with EPT unmarked in language achieved greater success, at the expense of greater cognitive effort because the hearer needs to adopt the speaker’s perspective and then perform EPT in the hearer’s world model (Steels, 2010). Robots with EPT marked in language (graph d) have an added “perspective indicator” in their conceptualization. Cognitive effort drops significantly, and the hearer knows which perspective to use instantly (Steels, 2010).
3.3.3 Discussion
EPT was found to be essential for communicative success (Steels, 2010). Spatial categories emerged as predicates in the robots’ conceptualization which helped reduce the cognitive effort of the hearer. This finding is significant for language evolution studies. From an evolutionary perspective, humans come from the superfamily of Hominoidea, of which the members are characterized by having no tails, being biped, and most significantly, having large brains. This comparatively large brain consumes a quarter of the body’s energy even when at rest; thinking was thus, a “costly” activity (Harari, 2014). It is possible that marking spatial categories in language was an evolutionarily more efficient way of using the brain.