- first prototype
Our general idea for our first design is to keep it simple. We needed something that was able to tackle our main issue which will be the buoyancy and stability of the whole buoy. On top of that, a large enough component that is able to hold our sensors and devices that we want to be deployed in the tank. While doing so, we needed to keep in mind to keep its footprint compact since we were told that every volume is valuable to industry companies.
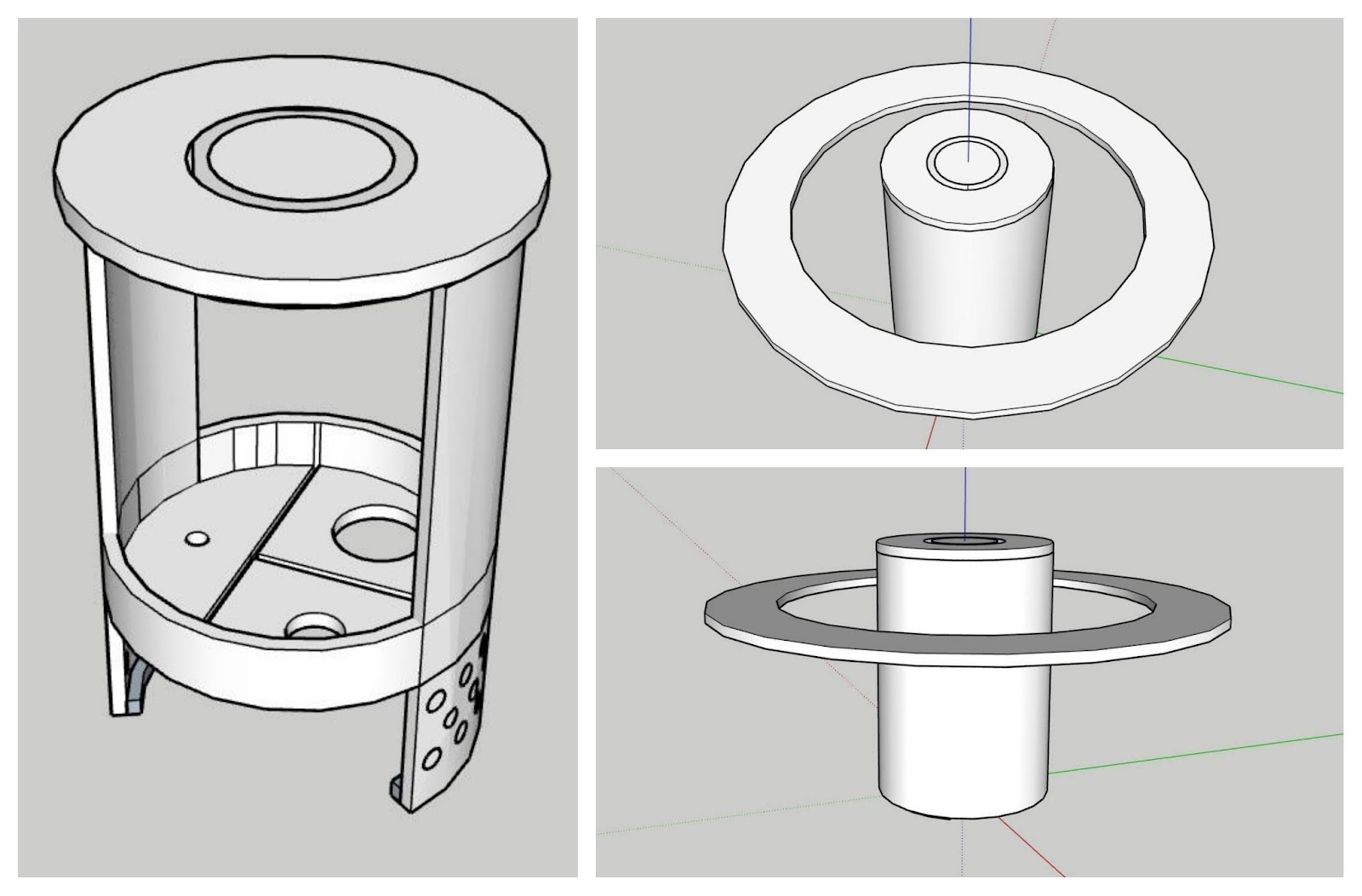
We did some sketching and this was what we had came up with. Our very first iteration that is able to tick our checklist. We have designed a case (as seen in the left photo) that is able to house all of our components snuggly, in a space as compact as possibly.
After running the case in a SOLIDWORKS stimulation, we found that it was far from buoyant and decided to add a ring to rectify this.
This resulted in the finalized first design as seen in the pictures on the right.
- second prototype
From our first prototype, we improved our device with the goal of making it more modular and serviceable. We approached it by breaking up the main compartment of the buoy into different components, thereby it more accessible. This can be seen in the picture on the right where each section has its own functionality.
We keep the general shape of the device similar to our first prototype since it was able to stay buoyant. We added a protective barrier at the bottom to keep the sensors safe from any nibbling by the fishes.
- third (and hopefully, final) prototype
We have finally settled on a shape to maintain buoyancy, portability and modularity. Through our knowledge from past modules and observations, we tried to keep the centre of gravity underneath the centre of buoyancy to keep the object unconditionally stable. We will place most of the heavy components like the battery and sensors near the bottom to achieve this.
We will be using the color yellow as it symbolizes special markings at sea.

- dispenser
This would be the last step of closing the loop — an automated dispenser that will release solutes when the water characteristics has met the allocated thresholds.
When we approached the design of the dispenser, we were certain that we wanted it to:
- able to be attached to the side of the tank
- able to hold large quantities of the solute so that it minimizes the frequency of the need to refill the solute of
We were given the idea by Hanyang (thank you!) of the Archimedes Screw.
Upon further expansion on the inspiration given, we came up with the idea of installing a motor and an Arduino to the end of the dispenser to be able to pick up signals sent to it and will start winding up the solutes, into the water. It will stop dispensing only when the sensors have picked up that the water characteristic is back to its normal level aka back below threshold.

- dispensers – final
After some discussion, we decided to change the design of the dispensers entirely, due to the following reasons:
- after the visit to the farm where we were able to finally get a