Week 2 (24 May – 30 May)
Our Finance IC Keith compiled the costs of the parts we intend to purchase which amount to $1510. The cost of the project is pretty high and we are trying to source alternative parts so that we would have spare budget in order to replace damaged parts or purchase additional ones.
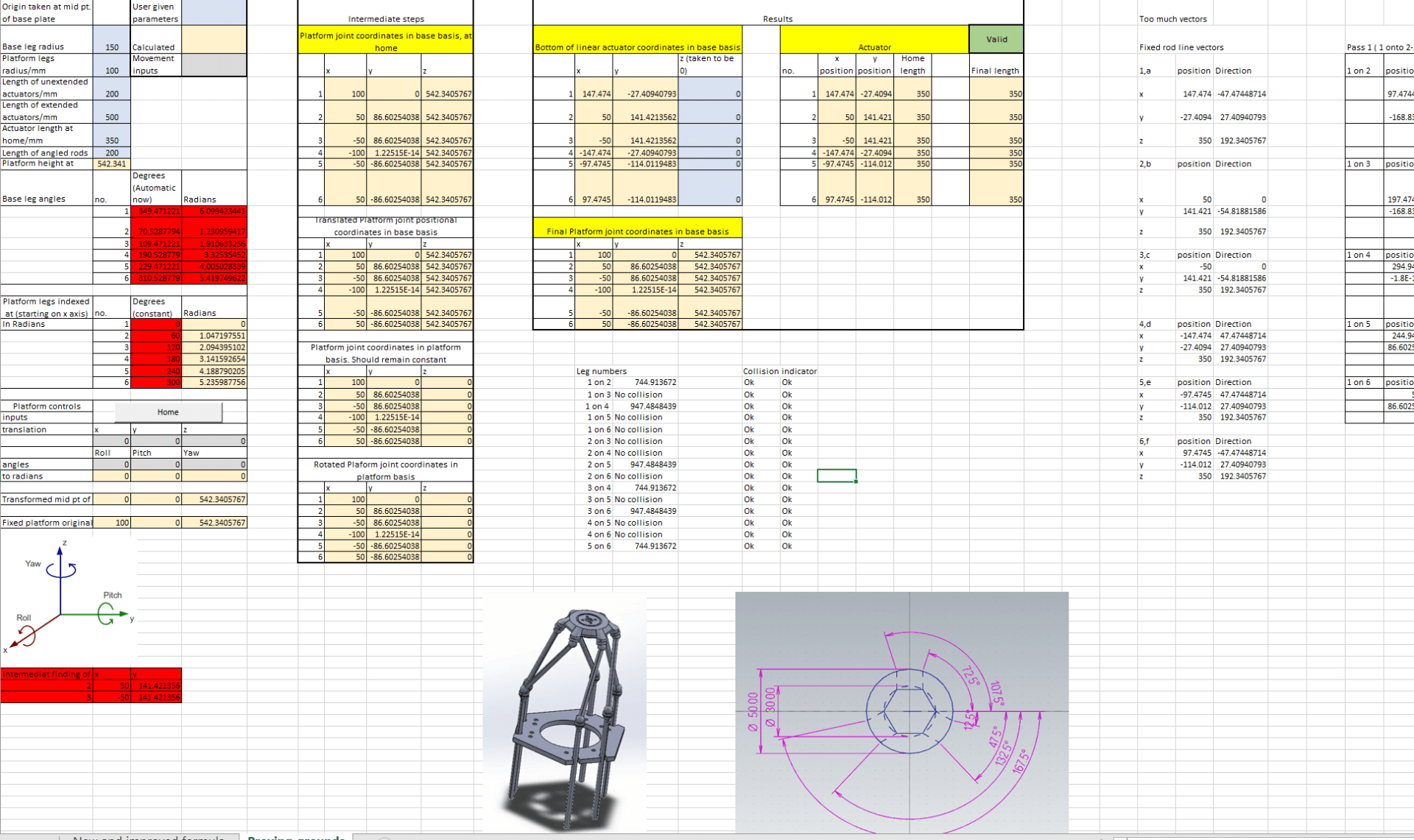
The research group completed an excel sheet draft and a Matlab simulation using the researched math which would take in values of x, y, z, roll, pitch, yaw, and output the actuator lengths required to achieve the pose.
Some of the challenges faced include conflicting ideas and mathematics in different research papers. Our version of the Stewart-Platform which employs fixed actuators and freely rotating rods is also vastly different from the commonly researched and used version of Stewart-Platforms which use freely moving linear actuators or servo motors. As a result, we had to make some modifications and adapt the equations found in the research papers for our Stewart-Platform. Unfamiliarity with Matlab also made the creation of the simulation difficult.
The hardware group finished its first revision of the Stewart-Platform model and implemented the mathematics researched by the research group into the model to produce a motion study.
The motion study showed that a translation in the x and y direction would result in an unintended roll and pitch of the platform. Further investigation is needed to understand and rectify this issue.
The research team will continue to optimize its mathematics model and develop a way to determine the range of motion of the platform and possible collisions between legs given a configuration of the Stewart-Platform.
In terms of our choice of electronic components and linear actuator, we decided to use the ESP32 as the microcontroller, DM542 as the motor driver, and the A2 HB60 as the linear actuator.
Preparation for the 1st presentation on the 28th of May also has to be completed.
Our Finance IC Keith compiled the costs of the parts we intend to purchase which amount to $1510. The cost of the project is pretty high and we are trying to source alternative parts so that we would have spare budget in order to replace damaged parts or purchase additional ones.
The research group completed an excel sheet draft and a Matlab simulation using the researched math which would take in values of x, y, z, roll, pitch, yaw, and output the actuator lengths required to achieve the pose.
Some of the challenges faced include conflicting ideas and mathematics in different research papers. Our version of the Stewart-Platform which employs fixed actuators and freely rotating rods is also vastly different from the commonly researched and used version of Stewart-Platforms which use freely moving linear actuators or servo motors. As a result, we had to make some modifications and adapt the equations found in the research papers for our Stewart-Platform. Unfamiliarity with Matlab also made the creation of the simulation difficult.
The hardware group finished its first revision of the Stewart-Platform model and implemented the mathematics researched by the research group into the model to produce a motion study.
The motion study showed that a translation in the x and y direction would result in an unintended roll and pitch of the platform. Further investigation is needed to understand and rectify this issue.
The research team will continue to optimize its mathematics model and develop a way to determine the range of motion of the platform and possible collisions between legs given a configuration of the Stewart-Platform.
In terms of our choice of electronic components and linear actuator, we decided to use the ESP32 as the microcontroller, DM542 as the motor driver, and the A2 HB60 as the linear actuator.
Preparation for the 1st presentation on the 28th of May also has to be completed.
Unintended roll and pitch during translation as shown in the motion study

28 May 1st Presentation

A small snapshot of calculations excel sheet