Contents
Overview
The purpose of this project is to build a robot that can explore an unknown arena and determine the fastest path from a start point to a set end point. To achieve this, an Arduino Uno is used as the primary microcontroller to control the robot’s movement. Additionally, the VNH5019 motor driver shield is used to interface with the Arduino Uno to control the 2 DC motors.
Arduino Uno

Arduino Uno
The Arduino Uno is used to control the movement of the robot and collect sensor data. It has 14 digital I/O pins and 6 analog I/O pins which are used to interface with the VNH5019 motor driver shield and the sensors, and a USB Serial port which is used for serial communication with the Raspberry Pi. This allows for communication between the PC, Raspberry Pi and Arduino Uno.
Motor Shield
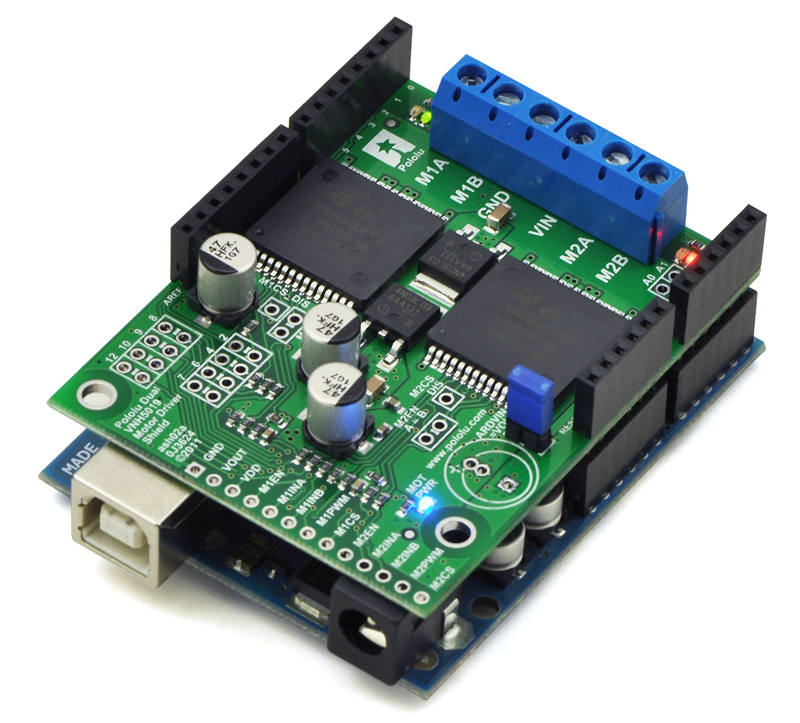
VNH5019 Motor Driver Shield
The VNH5019 motor driver shield allows for easy control of the motor speed and direction through its associated library. The shield is also able to output higher currents than the digital pins on the Arduino board, allowing it to drive both DC motors. This explains our rationale for using the Arduino Uno and motor driver shield for our project.