





The Blind Robot (2012)
Louis-Philippe Demers, Singapore
Description
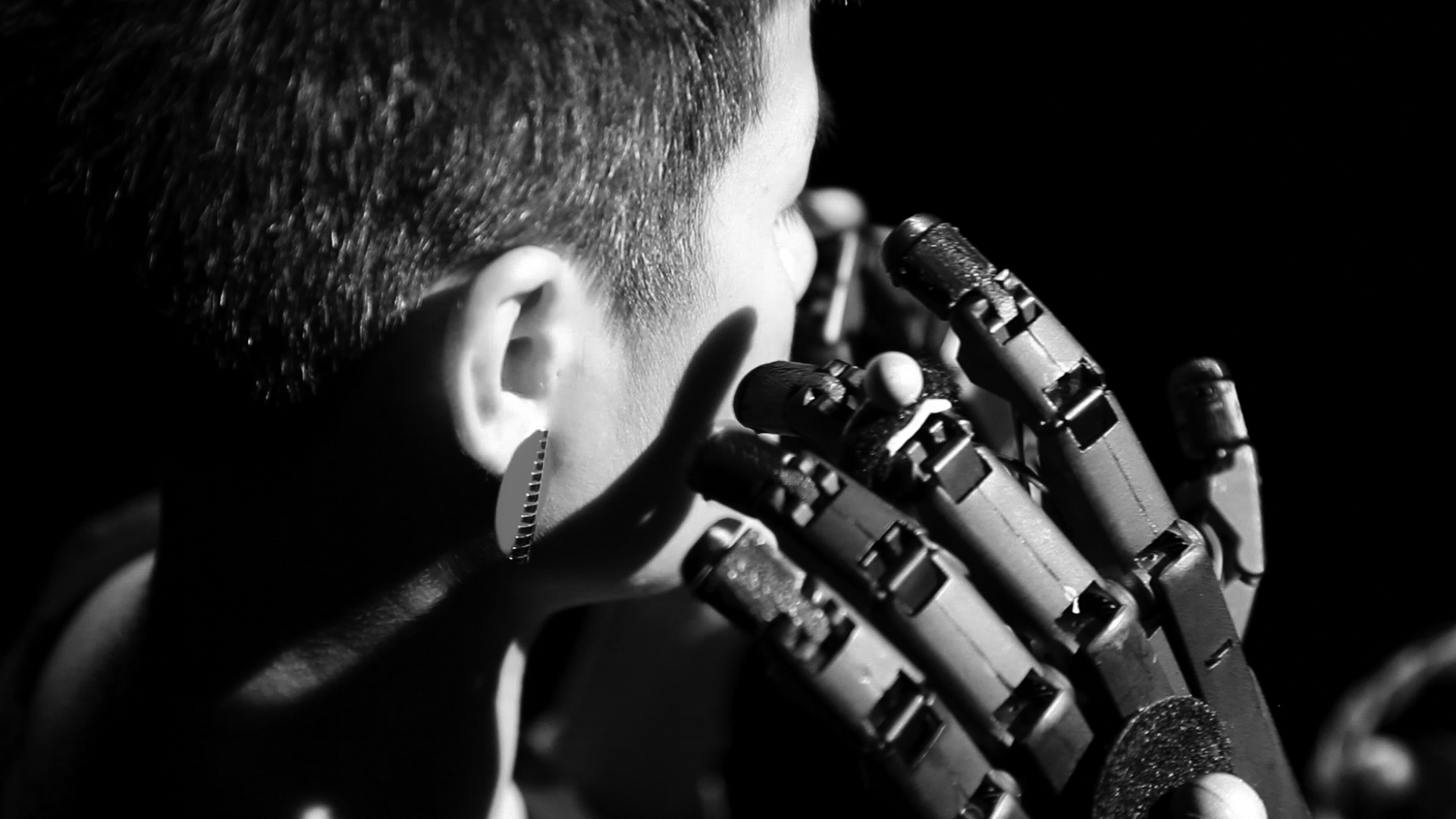
With The Blind Robot, the aim is to further understand the degrees of engagement – whether intellectual, emotional or physical – that are generated when a social robot intimately touches a person. Initially, The Blind Robot is a minimalistic piece of mechanical engineering. The rationale is to start from the recent known cultural artifact found in the robotic arm and transform this high precision tool into a fragile, imprecise and emotionally loaded agent.
In this installation, visitors are invited to sit in the front of this machine and engage into a non-verbal dialogue with it. The robot delicately explores the bode, the face and the upper body of the visitor in a manner that recalls what blind people do to recognize a person or an object.
The Blind Robot is a direct reference to the works of Merleau-Ponty and his example of the body extension of the blind man’s cane. When Feenberg analyzes Merleau-Ponty’s blind man’s cane, he concludes that the cane does more than sense the world; it also reveals the blind man as blind. It is this very aspect that the Blind Robot exploits: to create an empathic situation and a positive pre-disposition to the engagement. Furthermore, The Blind Robot is a direct allusion the chess-playing “Mechanical Turk”. The Blind Robot emanates a sense of intentionality and it becomes a Turing test of agency and perceived artificial life. The Blind Robot has the complex task of touching people softly, something achieved by hardly any contemporary robots.
Medium
Mechatronics, Rapid Prototyping, CNC, Polycarbonates, aluminium
Techniques
Hybrid Controls, Feedback Systems, Custom software.
Credits
Mechatronics
Dennis Low
Programming
Vineet Kuruvila
Funding
MOE Tier 1, NTU StartUp Grant for Digital Realities Laboratory