
Prior: YAY
In early May, we met up with Prof Benoit, Dr Ho and Tony to understand more about the aims of the project and its feasibility, with consideration of our schedules as well as potential areas to develop. We also got in touch with Jia Yong from the senior batch to clarify further regarding the work and expectations that will be involved. He emphasized the importance of role distribution and specialization, with members focusing on unique roles like radio and telemetry, piloting, logistics, cutting mechanism etc.
Week of 03 June: YAY
In this week we collated the senior’s previous working documents and tried to understand what the problems were that caused the failure of the previous group’s attempt at autonomous flight. We headed down to the lab where we took counts of the leftover logistical supplies (plane parts, radio hardware, LiPo batteries etc). We also dismantled the old Zeta Sky Observer plane which had crashed last year and tried to work out the wiring connections.
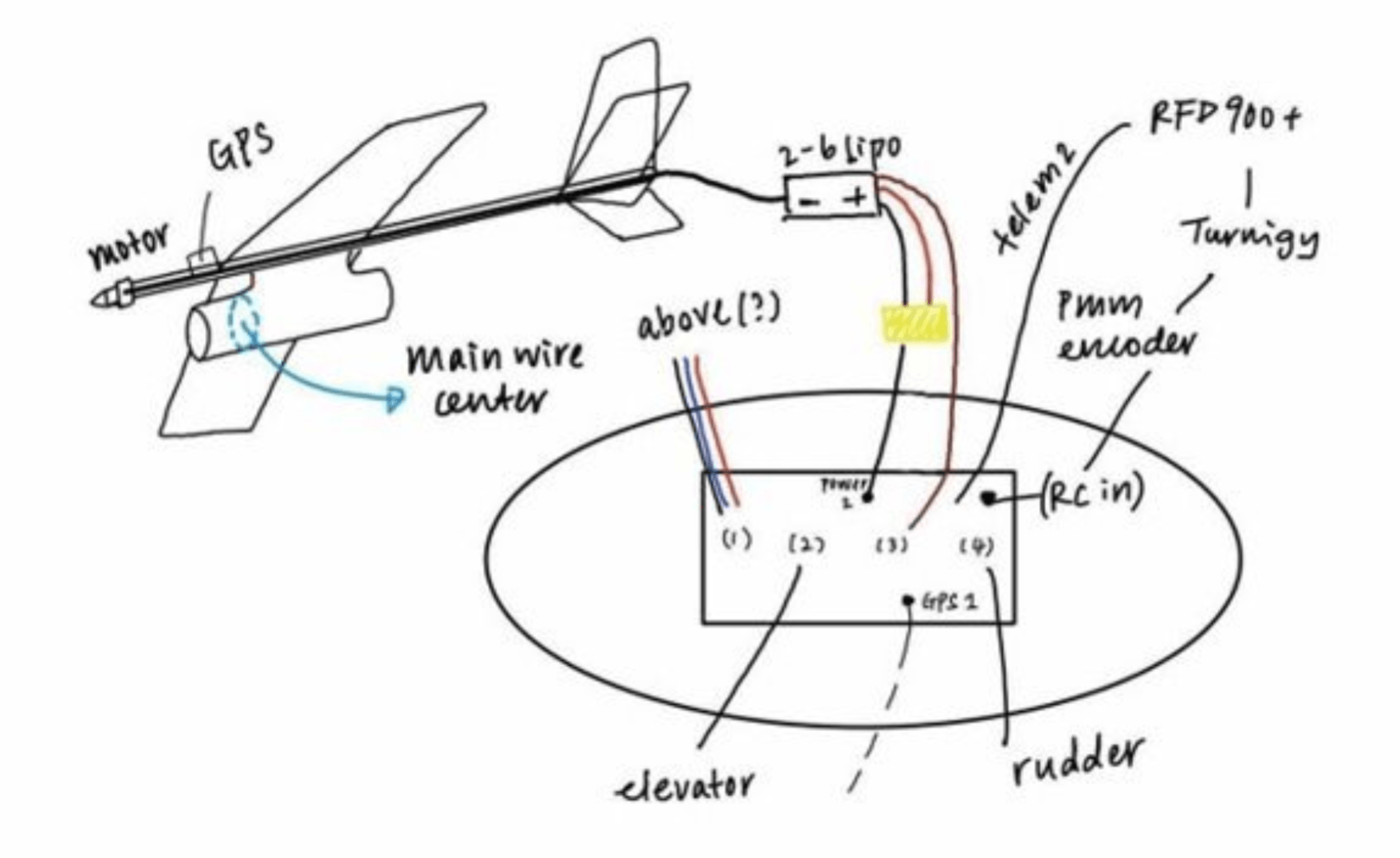
From what we observed, we drew up a basic wiring blueprint for manual control of the plane, which operates on Turnigy 9x Radio Control (RC) transmitter and a receiver:
Week of 10 June: YAY
We fixed up the new plane and connected the wires with the respective servos of the Rudder, Aileron, Elevator, and Motor. We also fixed the old plane to be used during our test flights, so that our new plane will not be accidentally damaged during our initial flights.

Having learnt that the heat-release mechanism might have contributed to the autopilot failure, we seeked to develop a different release mechanism that would allow for immediate release on command. We researched on potential release mechanism ideas, and initially thought of an electromagnetic release system. However, calculations suggested that significant energy consumption would be required, which would drain our in-flight battery and reduce surveillance time, hence we eliminated this idea. Following that, we read about the multi-ring mechanical release system, which we decided to try building given its minimal energy requirement.

Week of 17 June: YAY
2nd progress meeting! For this week, we presented on our idea of improving the release mechanism. The previous mechanism designed by seniors involved heating and cutting of the wire connecting the plane and the balloon. Although it was workable, it is however problematic as it cannot release immediately upon command due to the time needed for heating and burning. Moreover, it might fail under more extreme temperatures when this is sent out for the volcano field testing. Hence, our group decided to implement a mechanical multi-ring release mechanism instead. We also calculated the optimal volume of helium for the balloon to ascend at a desired rate (~1m/s for the 60m height restriction scenario in Singapore), with the payload being roughly 2.5kg, and concluded that the 500g balloon should be sufficient for desired lift.
Beyond that, we managed to meet up with Kanesh who gave us a lesson on the basic principles and terminologies of flight, and also gave us several tries at simulated flying using the Turnigy 9x RC transmitter which was connected to the Phoenix RC flight simulator software on his computer. It was certainly harder than expected, as the main control surfaces included the engine, elevator, aileron and rudder, all of which could be adjusted concurrently to give unique movements to the plane. After several tries, we decided that Wei Sern and Thu will train for the pilot role.


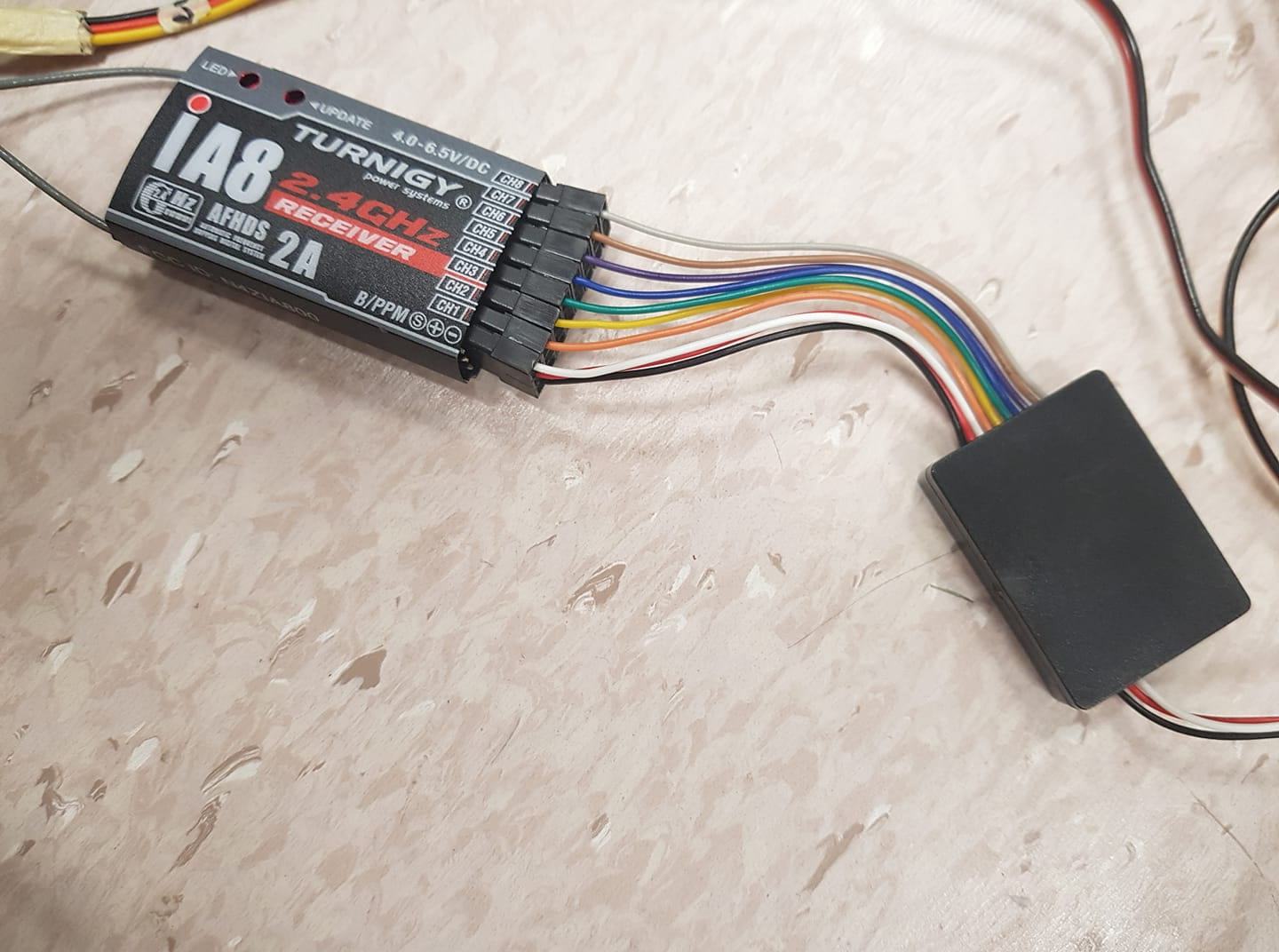
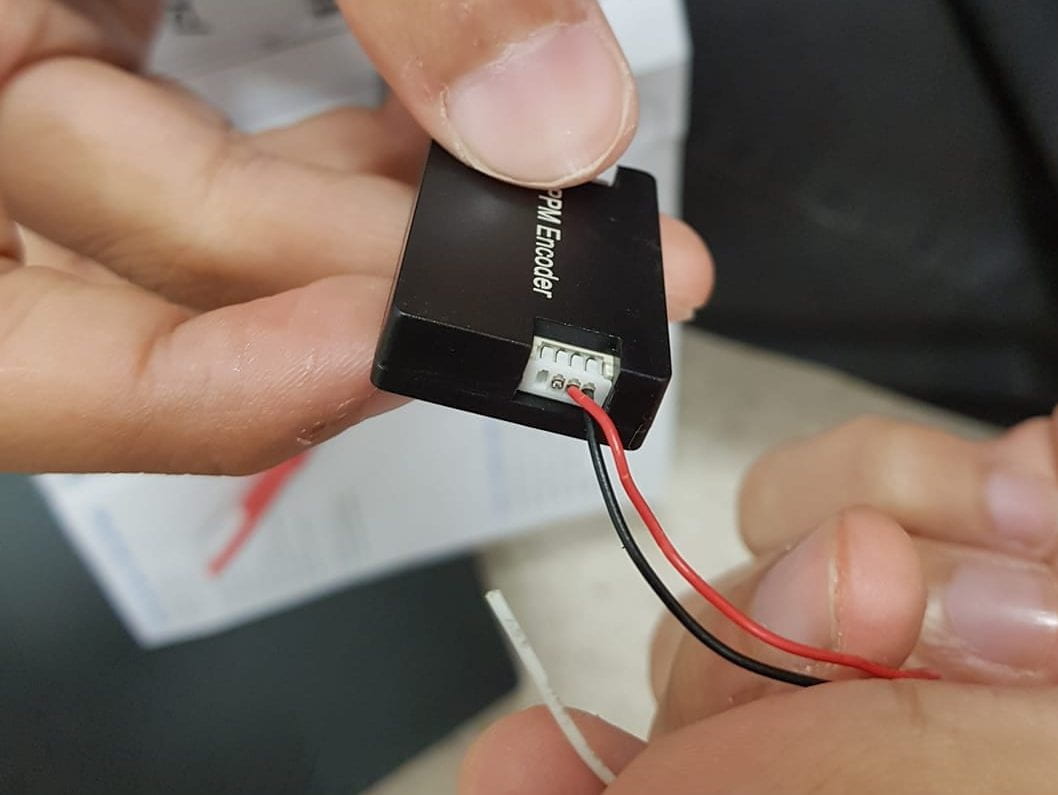
At the same time, we continued our research on the configuration of the Pixhawk 2.1 Cube, which is the autopilot flight controller that will sit in the flying plane and communicate with the ground control station (in our case, Mission Planner software on the computer); as well as the configuration of the Turnigy 9x RC transmitter used for manual control. We kept trying but we were unable to connect the RC transmitter to the receiver, and after persistent troubleshooting, we discovered that initially, the wiring was displaced by one unit which led to signal transmission issues (many wires, very confusing!); after resolving that, it still did not work, and we learnt that we needed to “bind” the transmitter with the receiver using a binding pin, which was unfortunately not in the kit we had! What’s worst was when the PPM encoder wire broke (many of the wires were very fragile :/)… So we proceeded to make the order for more PPM encoders, and in the meantime we managed to get one spare from Kanesh. Fortunately, Kanesh also had a binding pin for his own transmitter unit, so we were ultimately able to bind the RC transmitter with the receiver! Yay!
Week of 24 June: YAY
This week, we focused on developing the prototype designs for our mechanical release system, and continued to identify faults in the old plane and the hardware/software connections. Two prototypes (Rotational vs Translational) were made and after testing, the system with the translational motion was adopted.
Prototype #1: Rotational motion (Hook-release)
Initially, we designed a hook-release prototype whereby the metal hook is connected to both the servo & the rope of the helium balloon, such that upon rotation of the servo, the hook will escape from the rope’s ring and hence separate the balloon from the drone. However, upon tinkering and producing the prototype, it did not seem to work very well: firstly because the tension was applied directly onto the servo, which might cause breakage and hence premature release under unpredictable weather; secondly because the tension on the upper section of the hook could obstruct smooth release of the hook from the ring. Given the fragility and uncertainty of this design, we decided to return to the drawing boards…

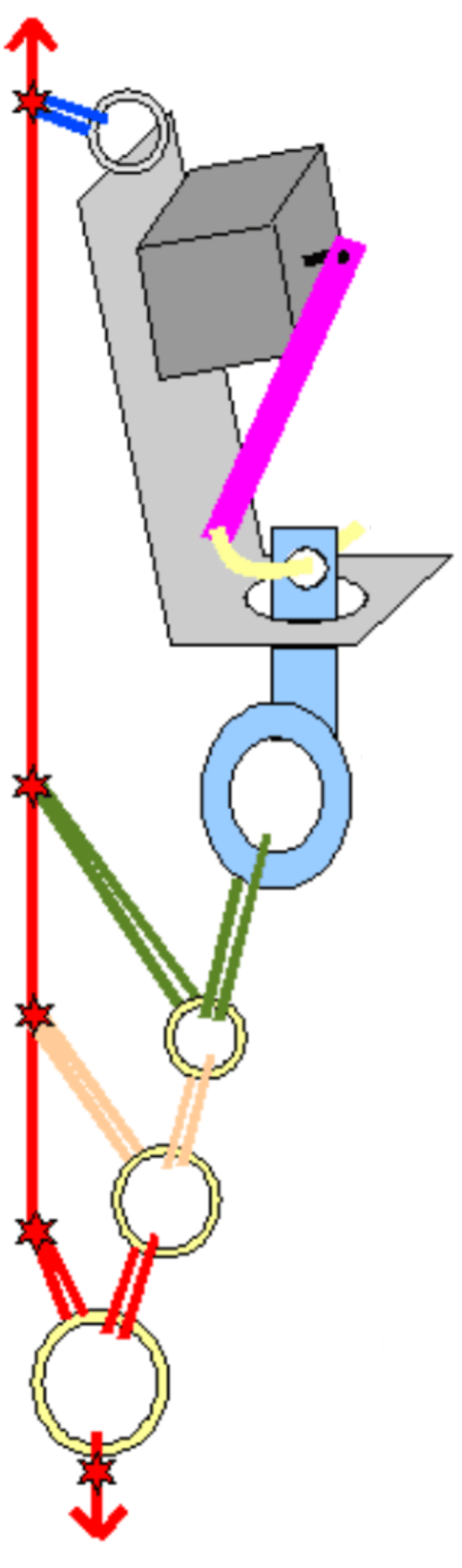
Prototype #2: Translational motion (Rod-release)
For the next design, we produced a rod-release prototype, whereby the multi-ring system is held intact by a vertical yellow rod with teeth (as shown below) which is aligned with a teethed wheel. Upon rotation of the wheel, the rod will leave the multi-ring system, which will then untangle and release the balloon from the plane drone. We 3D-printed the teethed wheel and the supporting pillar and secured the wheel onto a servo. After connecting the RC transmitter and allocating one of the auxiliary channel joysticks to the servo, we did the basic motor testing for the release mechanism. We found that while the motor itself could rotate up to 180°, after attaching the wheel, the wheel only moved up to 90°. This would be risky, because the movement of the rod might not be sufficient to escape from the multi-ring system for release. We were also thinking of how exactly to include the whole system into the plane compartment, as it would require sufficient space for movement. We needed more time before making a decision on the release mechanism…
During this period, we also tried to download the Phoenix RC v5 flight simulator from the Internet, but it was not freely available. We found a copy online, and while the screen showed the simulation, it was weird as there was no menu available and the throttle (engine control) was reversed no matter how we adjusted. Kanesh mentioned that he had his CD so we decided to wait for his version.
Week of 01 July:
3rd progress meeting! We presented on our updated release mechanism, shared about the hardware difficulties that we faced as well as other miscellaneous progress.
After the progress meeting, we continued preparations for our first upcoming flight test, which will likely take place next week. Over this and last week, we didn’t seem to be very lucky as more things got damaged/were discovered to be damaged… One of the buzzer wires broke; the AV system failed to work despite setting it up, and after testing it seemed like the AV transmitter was defective; The Turnigy 9x receiver was problematic again, as the ports for wire connections seemed loose; and a new problem was that our Turnigy 9x transmitter (which we need to control servos and the plane) spoilt! It started to produce smoke which was scary! So we quickly made the orders for replacement hardware. Hopefully, when the orders arrive next week, we can promptly assemble everything and prepare to fly for the first time!


During this period, we continued to figure out the configuration of the Pixhawk. Meanwhile, the progress of RC manual control connection stagnated as we were awaiting the delivery of the new Turnigy 9x transmitter. With regards to the release mechanism, in order to resolve the problem of limited rotation, we modified the servo to allow for continuous rotation, so that the teethed wheel could rotate more. XXXXXX……NOW IT DOES NOT STOP…. UPDATES…..XXXXXXXX

Also, due to seemingly loose wires (which were contained within the plane frame), we had to pull apart the fixed plane, check the connections and fix it back up as part of our troubleshooting process.
We obtained the Phoenix RC flight simulator CD from Kanesh, but after many attempts, the CD appeared to be corrupt and could not be read. As a last resort, we quickly checked local hobby and RC stores whether they were selling the Phoenix simulator software, and found that there were only 2 stores that might sell this software. We went down to Chinatown to check out 1 of the stores, only to find out that the software company had apparently discontinued its production so they no longer had any stock for this. We called in to the other store in Changi but were told the same thing. They did sell an alternative simulator called RealFlight, which we were hoping to get as a substitute, but it was incompatible with our Turnigy 9x RC transmitter. After all that, we were quite lost and could only wish for the best.
Week of 08 July:
Early part of the week
Finally, things seem to be getting better, with our newly-ordered parts arriving in faster than expected, as well as successfully obtaining our Phoenix RC v5 flight simulator software after conducting some serious investigation on the Internet. We quickly reconnect and reassemble the systems (RC systems)
With the new part’s arrival, we are now attempting to fix up our old and new planes. getting ready for the flying at the end of this week at …
Later part of the week
As usual, happiness is only temporary… Just early this week, we managed to get the plane motor and servos to respond to our RC controller when the Pixhawk flight controller is in operation (this has been an obstacle for us). The very next day, it worked for once but a minute after that, without changing anything, our plane motor decides to become unresponsive while the servos remain connected! It started with the ESC & motor making weird beeping noises, and at one point, it even played a whole playlist of different beeps. Shortly after, it stopped responding. We did all the possible troubleshooting and corrections: ESC-motor connection loose? Nope. Motor damaged? Nope. Battery exhausted? Nope. We spent the whole day trying to solve this issue but to no avail, and we called for Kanesh’s help over Whatsapp yet the problem remained.
Week of 15 July onwards: FLIGHTS!!
14 July we went to Old Holland Road to conduct our first Manual flight test with the purpose to familiarize with manual flight mode
Following we fixed our damages and on 19 July outside the MnT lab. we conducted a helium quality test and measured the weight the helium could raise.

Soon after on 21 July we headed back to old holland road to conduct our second manual flight test. And yay we have gotten better at flying!
Following on 26 July we did a manual flight again and tested with run-cam, obtained video footage of the beautiful sunset albeit bad signal
Soon after we did our Manual flight test #4 and Autopilot flight tests and yay!!!