12/07/2019
Agenda:
- Continue testing audio to achieve live streaming and stereo effect (FFmpeg)
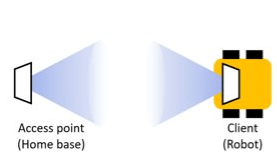
- Integrating angle measured by IMU with the strongest signal strength to turn the
- Started 3D-designing the casing for the tank to cover all the electronic parts so things do not fall over and the entire tank looks more marketable
Tasks Accomplished:
- Managed to live-stream stereo sounds but had many alsa xruns errors which led to the audio being cut off and lag time of 4-5s (but this was reduced from the 9s we initially encounter and the sound quality for this is much better)
- Coded for the IMU to be integrated with the extraction of signal strength so the transceiver will know exactly how much and which direction to turn to achieve the most signal and best connections.
Today… we finally live-streamed the stereo recording from our binaural microphones on a webpage after an entire week of struggle! Initially we met with a lot of alsa xruns errors which meant the webpage/ vlc viewer where we input the IP address could not receive the data as fast as the rpi is transferring over. This led to a very high latency of 8-9s but after we changed the buffer_size (which we finally got it after googling the entire time!), we managed to reduce the lag time to about 4s and the quality is much better with much less pauses in between due to the smaller number of xruns occurred.
Regarding the turntable and IMU, we managed to get the IMU working properly where we measured the angle that the transceiver turned with the tank from its original position and integrated this with the signal strength. The first step that we tried to do was to have a 360 deg scan for the strongest signal when the robot platform is stationary. Currently we faced problem of computational latency, so we tried to rearrange our lines in the code to ensure that both the best signal with the corresponding position (in terms of degree) were determined together for less computational lag and more accurate measurement obtained. We also modified our code to ensure there is no redundant and repetitive line to reduce processing time as well. Overall, we managed to get a relatively good measurement with the rpi taking measurement every 2-3 degrees the turntable rotates. (as compared to 30 degrees interval due to delay in transmitting/processing data). Best signal strength at a certain position can be determined, allowing the transceiver (client) to re-align by knowing exactly how much to turn and which direction to turn to receive the most signal and best connections. 🌝🌚🌝🌚🌝🌚