29/07/2019
Agenda:
- Mount everything on tank in their proper spaces
- Solve any unforeseen problems
Tasks accomplished:
- Mounted electronics and things on robot
- Bought a new passive to active adapter and a new switch from Sim Lim
Okay… so basically, the previous day, while we were stress testing the robot on our own, we fried the passive to active adapter and the switch because we connected the wrong cables to the IN and OUT ends of the adapter and our two main components fried. Without the switch, we cannot power most of the electronics including our camera and transceiver. Without the adapter, the transceiver is not powered up properly. 😭😭😭
To salvage this, we cabbed to Sim Lim the first thing in the morning to source for these new parts and fortunately, we managed to find the parts and get the tank to work again!
We then mounted the electronics on the tank and well… it does look good! 👍👍👍
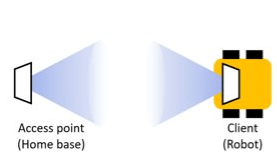
We had to finish up our slides while trying to overcome the servo motor code problem (which we feel that it may be due to a lag time observed during extraction of signal strength from the transceiver webpage when running the code). This results in some problems during calibration of the turntable angles and getting the turntable to face the right way for better connection. We tried but have not yet managed to solve the problem but we had to continue prepping for the presentation the next day and hope things go well!
Before we forget, here is a picture of our final product!

Final Product
Here is also a video of testing out our final product with the live stream video and audio. It is a successful test as shown in the video (1.12-1.30) where Jing Xuan is able to see and hear Ming En asking her to stop and make a U-Turn to go back into MnT lab. [Evidence can be seen in the live stream footage on the laptop screen]
While not all things worked out perfectly in the end, we managed to achieve most of what we wanted at the start – essentially the audio, video and movement of robot. What we did realise throughout this journey is that nothing is easy and robotics is hard but when we come together with our best efforts, we can ultimately make things work some way or another. This project cannot be completed without the help of Tony, Kelvin, our friends and all our teammates. Thank you for making this project an enjoyable yet fulfilling learning experience!
 Group Photo with Tony
Group Photo with Tony



 Screenshot of final design of 3D design for gear system and transceiver holder
Screenshot of final design of 3D design for gear system and transceiver holder



 Armcrest webpage vs Our own webpage
Armcrest webpage vs Our own webpage