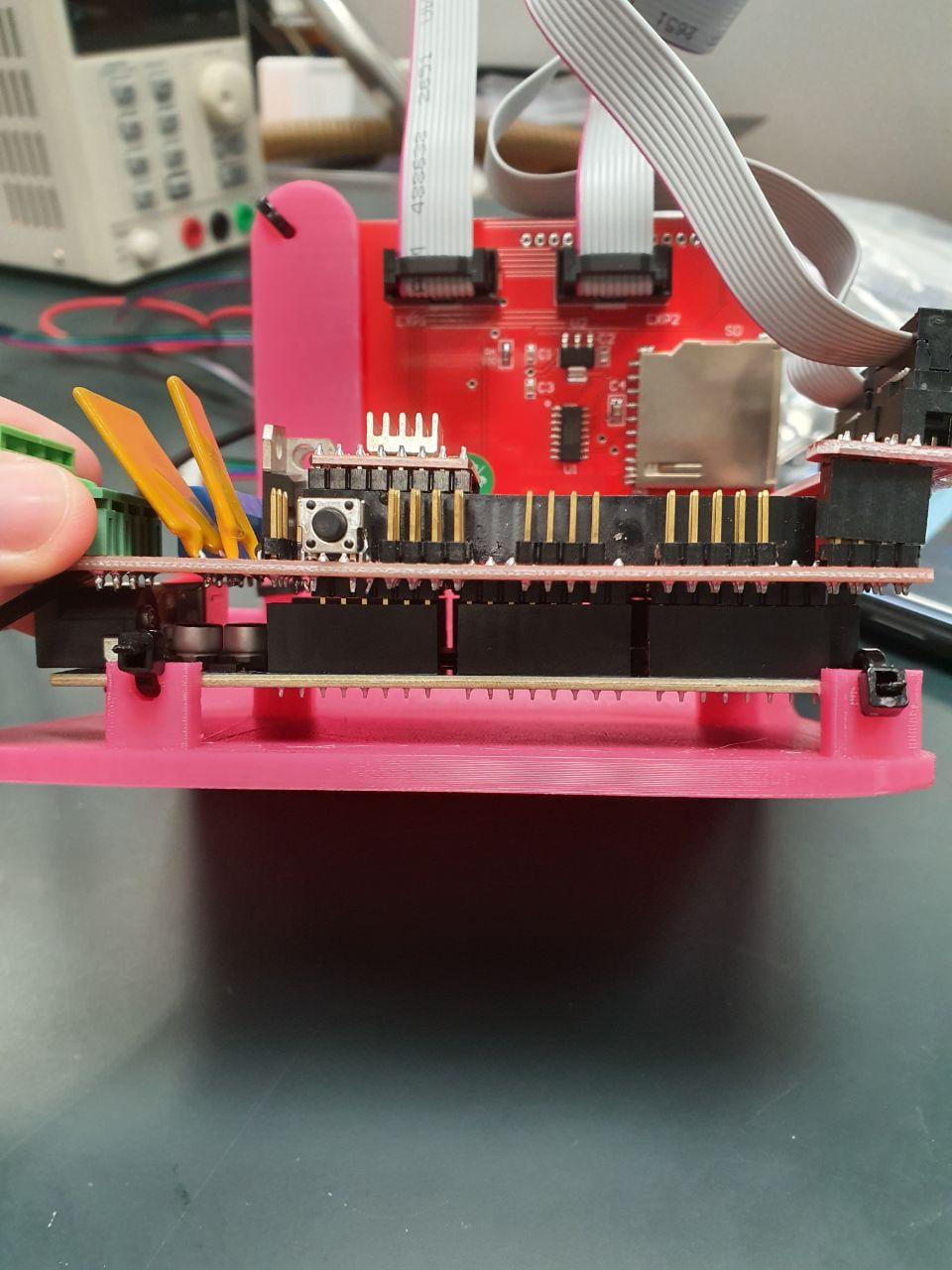
We (Chelsea and Clarice) made a trip to the laboratory to find out what items are available at the laboratory. While there, we assembled the RAMPS 1.4 controller, Arduino MEGA board, as well as an LED screen. This set up would be used to ease the controlling of the movement of the various axes. We later added all of the motor drivers so that we could use the X, Y and Z axes for the 3 axes of the 3D printer, as well as the E0 axis for the stepper motor.
After the first meeting, our group did more research on window-cleaning robots, and developed upon our idea with more details about what we envisioned our robot to be. These details are summarised:
Main features
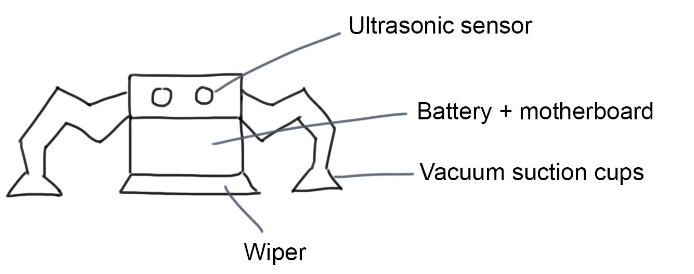
Autonomous Arduino spider robot with ultrasonic sensor on 4 sides
Suction cups on the legs for the robot to stick to glass (window)
Sprayer and wiper for cleaning
Additional features (which we will consider after realising the main features)
Parachute for safety precaution when the robot fails to stick to window
Solar panel
Mechanism to refill from water tank
We also decided that the main components of the robot will be constructed using parts from Arduino.
Top view of the robot (Source)Side view of the robot
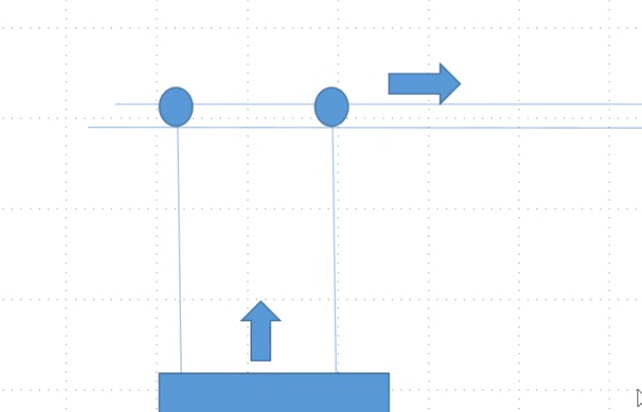
With the above understanding, we met with Dr Ho on 20 May on Microsoft Teams. Dr Ho told us that the most crucial feature of our project is that the robot must be able to stick to the glass window, and this feature would probably be the most challenging to implement too. We agreed with him, and mentioned the options that we were considering. Our top choice was to use suction pads, but the caveat is that the suction strength may not be sufficient. The use of vacuum was also something that we considered, but running the vacuum continuously will consume energy quite rapidly. We came to the conclusion that the scientific theory behind our current preliminary design was air-proofing – we need to create a low-pressure environment so that the atmospheric pressure can push the robot against the glass wall. Dr Ho also suggested another style of a window-cleaning robot that we have not considered, what he terms as the “gondola robot”. In essence, with this design style, the weight of the robot can be supported by external fixtures but we would need to find some way to ensure that the cleaning component comes into contact with the window.
Gondola robot
Wrapping up the meeting, we decided that we will first purchase a few different types of suction pads online to test how much weight they can hold. Additionally, when Phase 1 starts, we will head to the Making and Tinkering Lab to check out the different vacuum pumps available.
After our group was formed in early March, we held multiple discussions regarding the ideas we had for our project. For this year, there were three themes, namely a) Sustainability and the Environment, b) Health and Ageing Population, and c) Smart Homes/Living. Based on these themes, our group came up with the following ideas:
a) Sustainability and the Environment
Compost machine that generates energy & fertiliser
Step tracker that generates energy
Cooler that does not use electricity
b) Health and Ageing Population
Smart anti-slip shower mat
Nose filter that prevents dust and haze particles from entering the respiratory system
Bedsheet/bolster-changing machine
c) Smart Homes/Living
Vacuum cleaner that walks down stairs
Machine that pastes screen protectors
Smart alarm clock
Our group then assessed each idea’s feasibility and the overall usefulness of the end product, and concluded that we would propose the idea of the vacuum cleaner that walks down stairs to Dr Ho.
We met up with Dr Ho on March 19. Dr Ho asked us about the motivation behind our idea, and the places where our product can be utilised in. His questions made us realise that the target audience for our product is quite limited – most people in Singapore do not own multi-storey homes, and in industrial buildings, people take the lift instead. Dr Ho then suggested that we could look into the area of window-cleaning robots instead. After all, window-cleaning in high-rise buildings is a high-risk job. Our team agreed that automating the window-cleaning process is definitely an area that can be looked into. We decided that we will do more research about possible cleaning mechanisms, and scheduled to meet Dr Ho again after we come up with a clear plan about our new project.