After the first meeting, our group did more research on window-cleaning robots, and developed upon our idea with more details about what we envisioned our robot to be. These details are summarised:
Main features
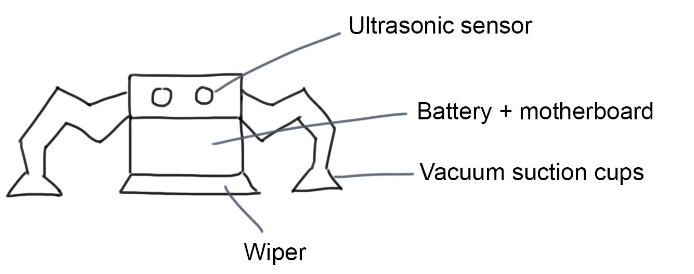
- Autonomous Arduino spider robot with ultrasonic sensor on 4 sides
- Suction cups on the legs for the robot to stick to glass (window)
- Sprayer and wiper for cleaning
Additional features (which we will consider after realising the main features)
- Parachute for safety precaution when the robot fails to stick to window
- Solar panel
- Mechanism to refill from water tank
We also decided that the main components of the robot will be constructed using parts from Arduino.

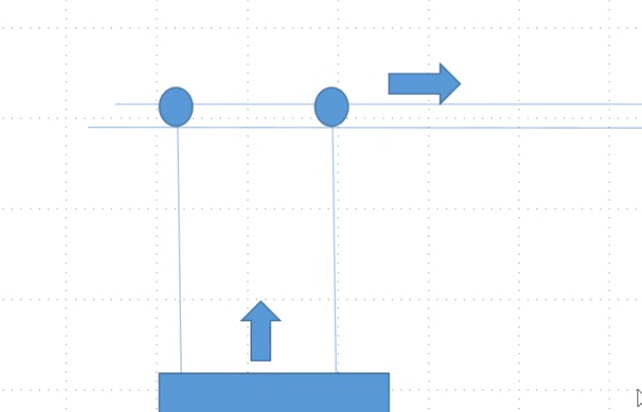
With the above understanding, we met with Dr Ho on 20 May on Microsoft Teams. Dr Ho told us that the most crucial feature of our project is that the robot must be able to stick to the glass window, and this feature would probably be the most challenging to implement too. We agreed with him, and mentioned the options that we were considering. Our top choice was to use suction pads, but the caveat is that the suction strength may not be sufficient. The use of vacuum was also something that we considered, but running the vacuum continuously will consume energy quite rapidly. We came to the conclusion that the scientific theory behind our current preliminary design was air-proofing – we need to create a low-pressure environment so that the atmospheric pressure can push the robot against the glass wall. Dr Ho also suggested another style of a window-cleaning robot that we have not considered, what he terms as the “gondola robot”. In essence, with this design style, the weight of the robot can be supported by external fixtures but we would need to find some way to ensure that the cleaning component comes into contact with the window.
Wrapping up the meeting, we decided that we will first purchase a few different types of suction pads online to test how much weight they can hold. Additionally, when Phase 1 starts, we will head to the Making and Tinkering Lab to check out the different vacuum pumps available.
Leave a comment